
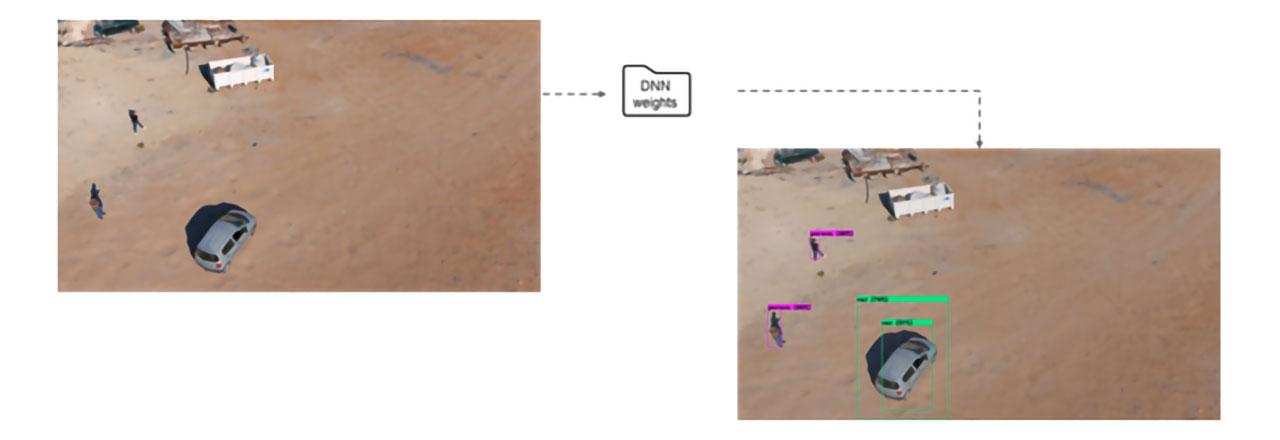
Object Detection
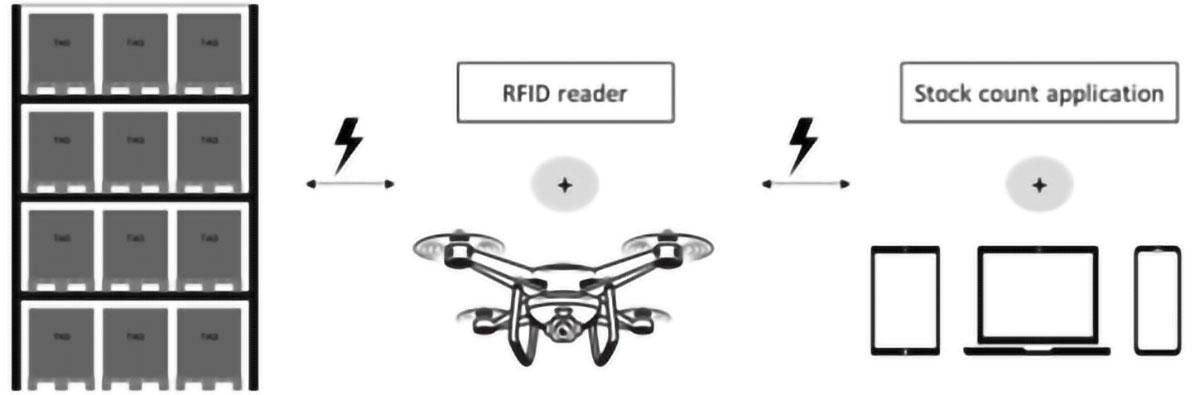
Απογραφή με RFID
Vision Picking
Η έρευνα επικεντρώθηκε στη φυσική ασφάλεια των logistics hubs και των εμπορευματικών λιμένων και είχε δυο βασικούς πυλώνες:
Παραμετροποίηση μοντέλου νευρωνικού δικτύου για ανίχνευση σε πραγματικό χρόνο
Για την επιτήρηση των logistics hubs και των εμπορευματικών λιμένων προτείνεται η ανίχνευση αντικειμένων ενδιαφέροντος σε πραγματικό χρόνο. Για το σκοπό αυτό, διερευνήθηκε η εφαρμογή μοντέλων νευρωνικού δικτύου μηχανικής όρασης που απαιτούν χαμηλότερη υπολογιστική ισχύ, όπως το YOLOv3 (Redmon, et al., 2016). Η έρευνα εστιάζει στις κατάλληλες αρχιτεκτονικές που χρησιμοποιήθηκαν, τις παραμέτρους του εν λόγω νευρωνικού δικτύου και την ανάπτυξη της κατανόησης αιτιών και αποτελέσματος μεταξύ των παραμέτρων και της αρχιτεκτονικής του μοντέλου σε σχέση με την ταχύτητα και την αποτελεσματικότητα ανίχνευσης.
Εύρεση κατάλληλου συστήματος UAV για την εκτέλεση της ανίχνευσης σε πραγματικό χρόνο
Η έρευνα επικεντρώθηκε επίσης στην εύρεση του κατάλληλου συστήματος UAV και την πιθανή ενσωμάτωση αισθητήρων και onboard CPUs στο σύστημα UAV για την εκτέλεση της δραστηριότητας ανίχνευσης με την εφαρμογή των παραπάνω αλγορίθμων τεχνητής νοημοσύνης. Το ολοκληρωμένο σύστημα UAV δοκιμάστηκε σε επιλεγμένες δραστηριότητες.
- Εφαρμογή ολοκληρωμένου συστήματος ανίχνευσης αντικειμένων με τη χρήση UAV
- Λήψη εφαρμογής DeOPSys Object Detection Operations
- Λήψη εγχειριδίου χρήσης λογισμικού DeOPSys object-detection
Επιπλέον των παραπάνω, το Πανεπιστήμιο Πελοποννήσου ανέπτυξε μία υπηρεσία διαμοιρασμού, επισημείωσης (annotation), αναζήτησης, δημοσιοποίησης και λήψης συνόλων δεδομένων (datasets) τα οποία χρησιμοποιήθηκαν ή/και προέκυψαν από την εκπαίδευση του νευρωνικού δικτύου. Με την υπηρεσία αυτή ο χρήστης μπορεί να αναζητήσει και να κατεβάσει τα σύνολα δεδομένων που χρησιμοποιήθηκαν στην παρούσα υπηρεσία αλλά και άλλα σύνολα δεδομένων του έργου ENIRISST+.
Εφαρμογή ολοκληρωμένου συστήματος ανίχνευσης αντικειμένων με τη χρήση UAV
Η πλατφόρμα DeOPSys Object Detection Operations έχει σχεδιαστεί για την ανίχνευση και αναγνώριση αντικειμένων σε φυσικό περιβάλλον. Αποτελείται από τέσσερις διακριτές λειτουργίες, η καθεμία από τις οποίες είναι σχεδιασμένη για να ανταποκρίνεται σε συγκεκριμένες ανάγκες και εφαρμογές, ιδιαίτερα στον τομέα της επιτήρησης σε εγκαταστάσεις εφοδιασμού και λιμάνια και διαδραματίζει καίριο ρόλο στην προστασία των φυσικών εγκαταστάσεων από πιθανές απειλές. Πέραν αυτού, παρέχει ένα φιλικό προς τον χρήστη τερματικό περιβάλλον, εξασφαλίζοντας προσβασιμότητα και ευκολία χρήσης. Η εφαρμογή χρησιμοποιεί αλγόριθμους ανίχνευσης αντικειμένων και μοντέλα βαθιάς μάθησης, εξασφαλίζοντας την παροχή αξιόπιστων αποτελεσμάτων κάτω από ποικίλα σενάρια επιτήρησης. Ο καινοτόμος χαρακτήρας της εφαρμογής της και η δυνατότητά της να δέχεται διαφορετικά εκπαιδευμένα μοντέλα βαθιάς μάθησης επιτρέπουν στους χρήστες να δοκιμάσουν απρόσκοπτα τα εκπαιδευμένα τους μοντέλα σε πραγματικές συνθήκες.

Οι τέσσερεις διακριτές λειτουργίες είναι οι παρακάτω:
- Ανίχνευση αντικειμένων σε πραγματικό χρόνο με τη χρήση της κάμερας του UAV
- Ανίχνευση αντικειμένων μέσω εικόνας
- Ανίχνευση αντικειμένων μέσω βίντεο
- Ανίχνευση αντικειμένων σε πραγματικό χρόνο με τη χρήση του αντικατοπτρισμού της οθόνης του ελεγκτή πτήσης του UAV
- Ανίχνευση αντικειμένων σε πραγματικό χρόνο με τη χρήση της κάμερας του UAV
Η λειτουργία ανίχνευσης αντικειμένων σε πραγματικό χρόνο με τη χρήση καμερών UAV ή/και webcam μπορεί να ενσωματωθεί τόσο σε εναέριες όσο και σε επίγειες πλατφόρμες και αξιοποιεί τη δύναμη των αλγορίθμων υπολογιστικής όρασης για την ανίχνευση αντικειμένων σε πραγματικό χρόνο καθώς οι τροφοδοσίες βίντεο της κάμερας αποστέλλονται σε πραγματικό χρόνο στο φορητό υπολογιστή. Η λειτουργία είναι πλήρως αυτοματοποιημένη, χρησιμοποιεί προηγμένους αλγορίθμους βαθιάς μηχανικής μάθησης, και μπορεί να εκτελεστεί σε εφαρμογές επιτήρησης εγκαταστάσεων εφοδιαστικής και λιμανιών για την ενίσχυση των μέτρων ασφαλείας και την προστασία από πιθανές απειλές. Τα αποτελέσματα αυτής της αυτοματοποιημένης ανίχνευσης παρουσιάζονται στη συνέχεια αποτελεσματικά στον χρήστη, εξασφαλίζοντας έγκαιρες και ακριβείς πληροφορίες.
- Ανίχνευση αντικειμένων μέσω εικόνας
Η λειτουργία ανάλυσης εικόνας εντοπίζει αντικείμενα και δίνει τη δυνατότητα στους χρήστες να επιβλέπουν τα εντοπισμένα αντικείμενα στις στατικές εικόνες, καθιστώντας την ένα εργαλείο για την ενίσχυση της επιτήρησης σε εγκαταστάσεις logistics και λιμάνια. Με την απλή μεταφόρτωση μιας εικόνας στην εφαρμογή, τα αντικείμενα ενδιαφέροντος εντοπίζονται αυτόματα, χάρη στους εξελιγμένους αλγόριθμους βαθιάς μηχανικής μάθησης που χρησιμοποιεί το σύστημα, ώστε οι χρήστες μπορούν να ελέγχουν και να επιβλέπουν τα αντικείμενα αυτά . Αυτή η αυτοματοποιημένη διαδικασία ενισχύει περαιτέρω την ασφάλεια και την ανίχνευση απειλών σε αυτά τα κρίσιμα περιβάλλοντα.
- Ανίχνευση αντικειμένων μέσω βίντεο
Η λειτουργία επεξεργασίας βίντεο, δίνει στους χρήστες τη δυνατότητα να επεξεργάζονται ολόκληρες ροές βίντεο, να εντοπίζουν αντικείμενα σε πραγματικό χρόνο και να πραγματοποιούν λεπτομερείς επισκοπήσεις. Αυτή η λειτουργία, η οποία καθοδηγείται από προηγμένους αλγόριθμους βαθιάς μηχανικής μάθησης, αυτοματοποιεί την αναγνώριση και τον εντοπισμό αντικειμένων, παρέχοντας πολύτιμες πληροφορίες στους χρήστες. Επιπλέον, οι χρήστες έχουν την ευελιξία να επανεξετάζουν οποιοδήποτε βίντεο όσες φορές χρειάζεται, ενισχύοντας τα μέτρα ασφαλείας και διευκολύνοντας τη λεπτομερή ανάλυση δεδομένων σε εγκαταστάσεις logistics και λιμάνια .
Η προτεινόμενη έρευνα επικεντρώνεται σε δραστηριότητες που αφορούν άμεσα τους εμπορευματικούς λιμένες – logistics hubs της νησιωτικής μας χώρας, όπως, η αυτόματη αναζήτηση εμπορευμάτων και απογραφή εντός ανοικτών και κλειστών αποθηκών. Για την ανάπτυξη έξυπνων συστημάτων drones που θα υποστηρίξουν τις ως άνω δραστηριότητες, προτείνεται την ενσωμάτωση, ολοκλήρωση και περαιτέρω διερεύνηση προηγμένων τεχνολογιών Logistics 4.0.
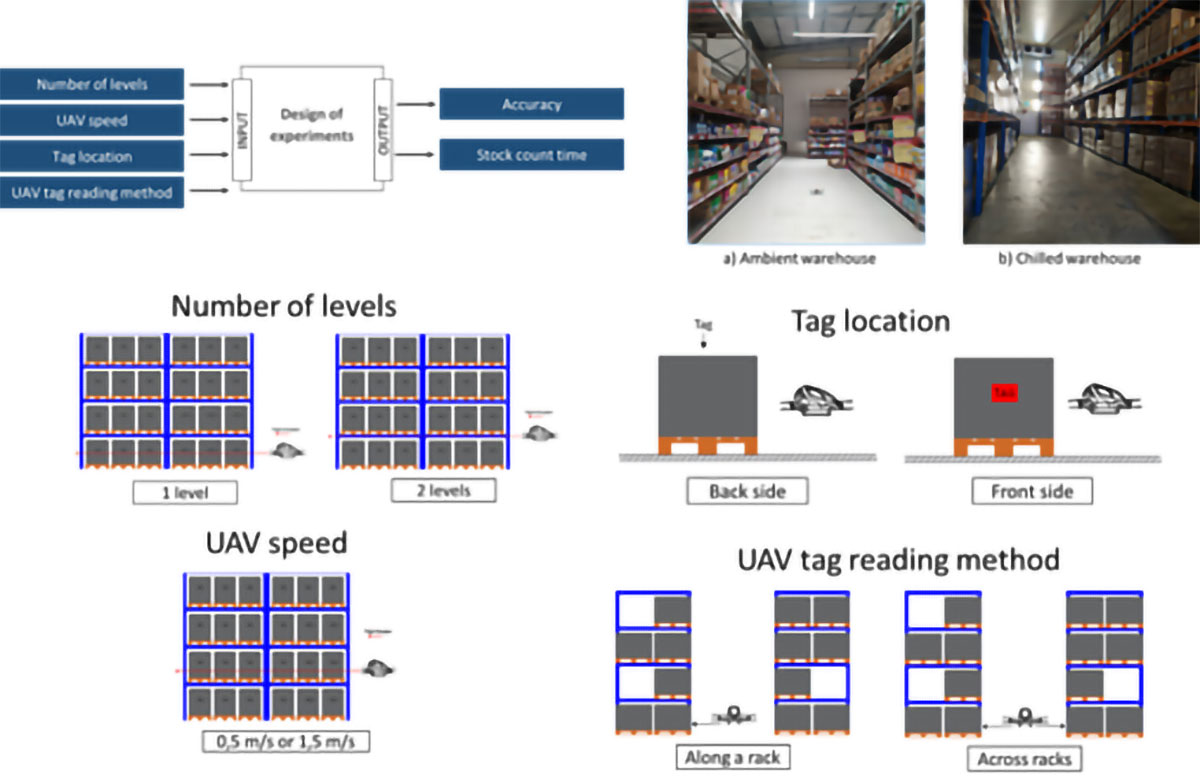
Μέσω της έρευνας για την αναζήτηση και απογραφή εμπορευμάτων, διερευνάται η χρήση του συστήματος drone σε συνδυασμό με την τεχνολογία RFID reader. Συγκεκριμένα, διερευνάται η αξιοπιστία των αποφάσεων με βάση τις παραμέτρους των συστημάτων, όπως για παράδειγμα η ταχύτητα του drone σε συνδυασμό με την ανάγνωση του RFID reader. Η έρευνα και οι πιθανές βελτιώσεις που πρέπει να διεξαχθούν αφορούν το συνδυασμό των κατάλληλων παραμέτρων με σκοπό την καλύτερη ακρίβεια ανάγνωσης και απογραφής των προϊόντων.
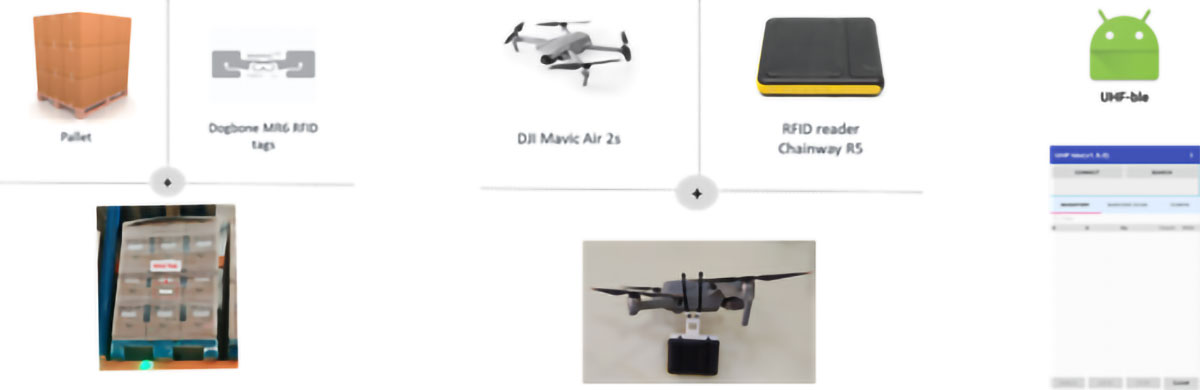
Η εν λόγω έρευνα επικεντρώνεται επίσης στη συλλογή και επεξεργασία των πληροφοριών που παρέχονται από το σύστημα drone (τι πληροφορία, πως γίνεται η επεξεργασία, πως υποστηρίζεται η λήψη των σχετικών αποφάσεων) και στην κατάλληλη ανάπτυξη του ολοκληρωμένου συστήματος των drones (εξοπλισμός και λογισμικό). Τέλος, πραγματοποιήθηκε η πιλοτική εφαρμογή του συστήματος drones σε επιλεγμένες δραστηριότητες.



Λήψη του λογισμικού DeOPSys Inventory
Λήψη εγχειριδίου DeOPSys Inventory
Λήψη ενδεικτικών αποτελεσμάτων
Δημοσιεύσεις & Βραβείο
Δημοσιεύσεις
Thomaidis, N.C. & Zeimpekis, V. (2023) ‘Adopting Unmanned Aerial Vehicles (UAVs) for real-time stock count process in warehouse facilities: Evidence from experimental results’, 9th International Symposium and 31st National Conference on Operational Research (HELORS 2023), Athens, Greece, 29 – 30 June and 1 July.
Thomaidis, N.C. & Zeimpekis, V. (2023) ‘Investigation of operational parameters that affect the use of drones in goods’ stock count process: Evidence from experimental results’, 29th International Joint Conference on Industrial Engineering and Operations Management (IJCIEOM), Lisbon, Portugal, 28 – 30 June.
Thomaidis, N.C. & Zeimpekis, V. (2022) ‘Adopting UAVs for product stock count process in warehouses: An overview of parameters that affect operational performance’, European Conference on Operational Research (EURO 2022), Espoo, Finland, 3 – 6 July.
Thomaidis, N.C. & Zeimpekis, V. (2022) ‘Adopting Unmanned Aerial Vehicles (UAVs) in logistics operations: A classification of parameters that affect operational performance’, 29th International EurOMA Conference, Berlin, Germany, 1 – 6 July.
Βραβείο
Supply Chain Awards 2023: The research conducted in this MRes thesis has been awarded with the first (gold) prize in the category “research projects supply chain” under the supply chain awards 2023 contest.
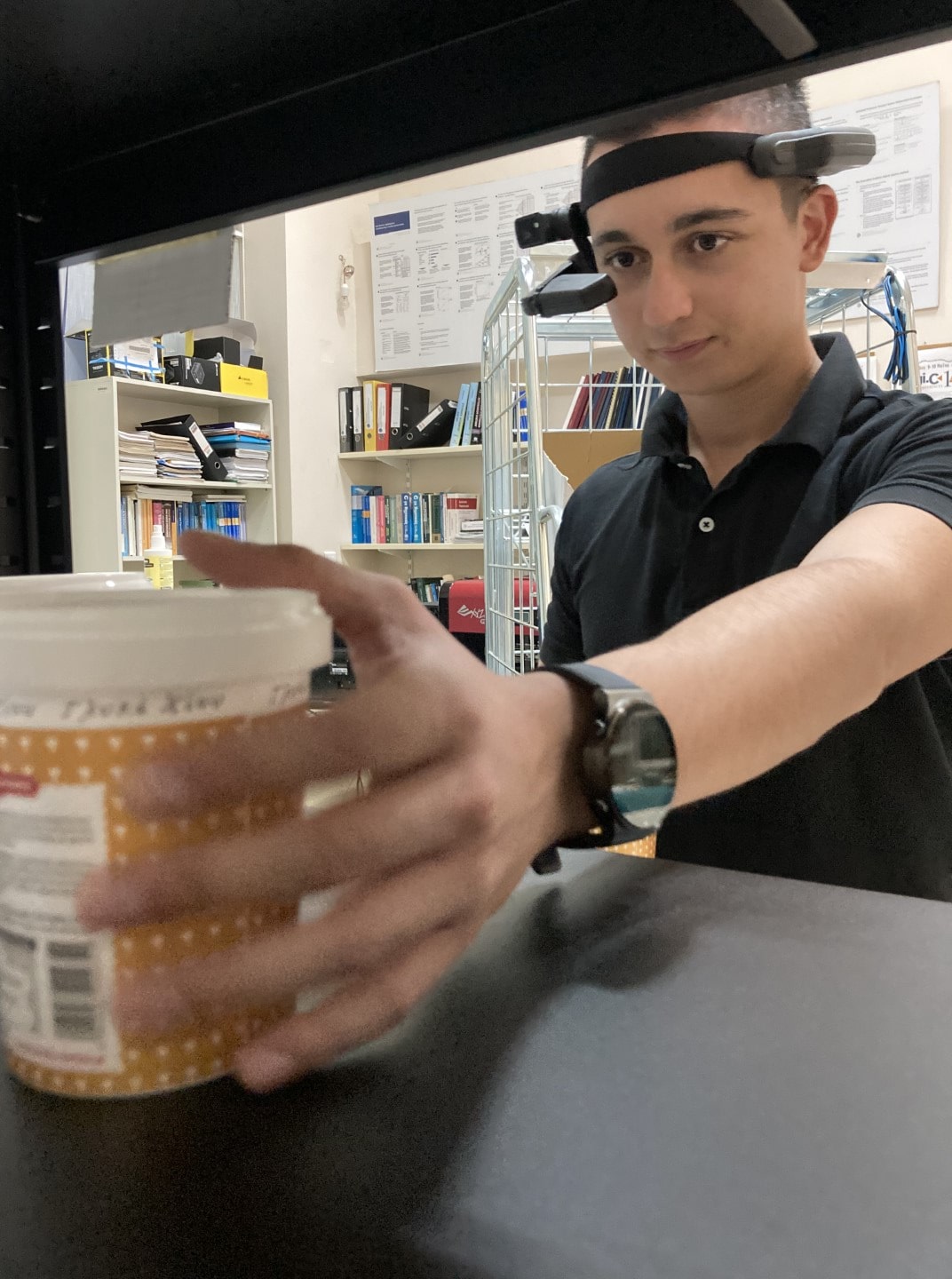
Συλλογή αγαθών με χρήση έξυπνων γυαλιών επαυξημένης πραγματικότητας (vision picking)
Η συλλογή παραγγελιών μέσω επαυξημένης πραγματικότητας (AR) αποτελεί μια από τις πιο καινοτόμες λύσεις για βιομηχανικό περιβάλλον, καθώς μέσω της τεχνολογίας που χρησιμοποιείται, επιτυγχάνεται βέλτιστη οπτική καθοδήγηση (vision picking) στο εσωτερικό των αποθηκευτικών χώρων και πλήρη αξιοποίηση των χεριών (hands-free) των εργαζόμενων. Μέσω της εν λόγω τεχνολογίας η συλλογή των προϊόντων πραγματοποιείται με τη χρήση έξυπνων γυαλιών πάνω στα οποία προβάλλονται όλες οι απαιτούμενες εικόνες και πληροφορίες που πρέπει να γνωρίζει ο εργαζόμενος κατά τη διάρκεια της συλλογής.

Πειραματικό περιβάλλον συλλογής παραγγελιών





Οι σημαντικές δραστηριότητες της προτεινόμενης έρευνας περιλαμβάνουν τις εξής:
- Σχεδιασμός του κατάλληλου συστήματος vision picking για συλλογή αγαθών
- Έρευνα για την ολοκλήρωση του συστήματος vision picking με τα συστήματα και τεχνολογίες όπως αναφέρθηκαν παραπάνω
- Έρευνα για την κατάλληλη συλλογή και επεξεργασία των πληροφοριών που παρέχονται από το σύστημα vision picking
- Κατάλληλη ανάπτυξη του ολοκληρωμένου συστήματος vision picking (εξοπλισμός και λογισμικό)
- Πιλοτική εφαρμογή του συστήματος vision picking σε δραστηριότητες συλλογής αγαθών και συγκριτική αξιολόγηση του συστήματος με συμβατικές μεθόδους συλλογής (π.χ. RF-scanners)